Why Use Control Points?
Use measured control points to undistort the mapping artifacts when an especially high map accuracy is needed, or if not enough loop closures are possible. Users will be able to gauge the maximum remaining errors within a dataset. Control points will also allow for the automatic alignment of datasets during post-processing, even without measuring the control points. They will improve the accuracy of point clouds.
Why Does Drift Error Occur?
NavVis Mapping technology is based on SLAM algorithms that use sensors' information to incrementally build a 3D model of a building. This is a powerful and flexible approach, but like many mapping technologies, it works by chaining measurement after measurement. This chain of measurements is called the trajectory estimate. You can think of it as many cartesian coordinates describing where the device most likely was, relative to the dataset origin, at which point in time.
Even though each individual measurement has very high accuracy, chaining many of them together means that, over time, there can be a drift error in the device's position estimate. This can show up as distortions in the mapping results, such as a slight bending of long corridors compared to the true building geometry.
How To Combat Drift
Loop closures are one way to combat drift. Our algorithms recognize previously visited places and use that knowledge to adjust the trajectory estimate. However, loop closures may not be feasible in every building layout, or you may need to achieve a higher accuracy to a higher degree of certainty. This is where measured control points come in.
Measured Control Points
Let us illustrate how measured control points lead to a more accurate map using an example.
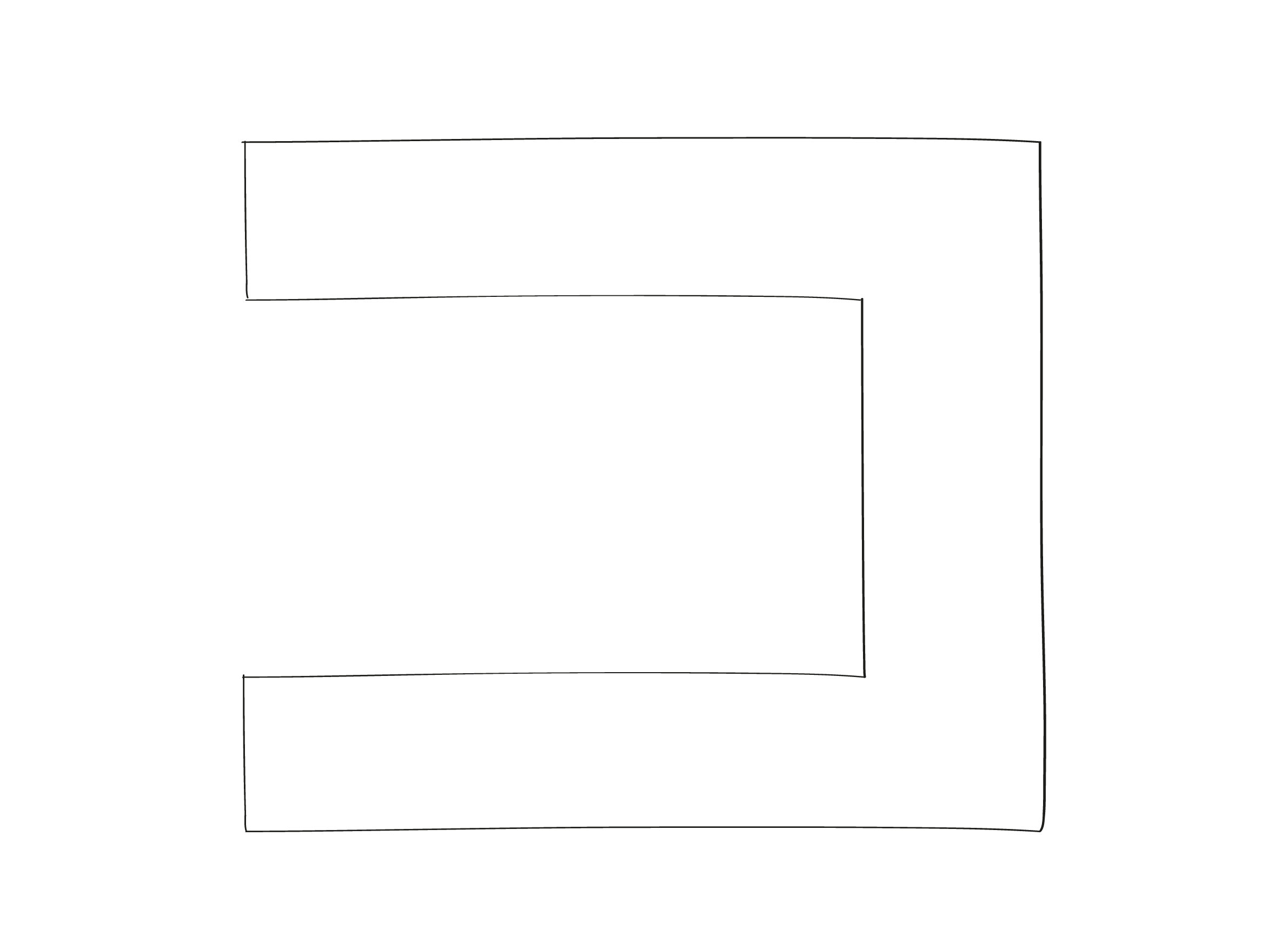
This is the real building:
Place control points in the building and measure them with a total station.
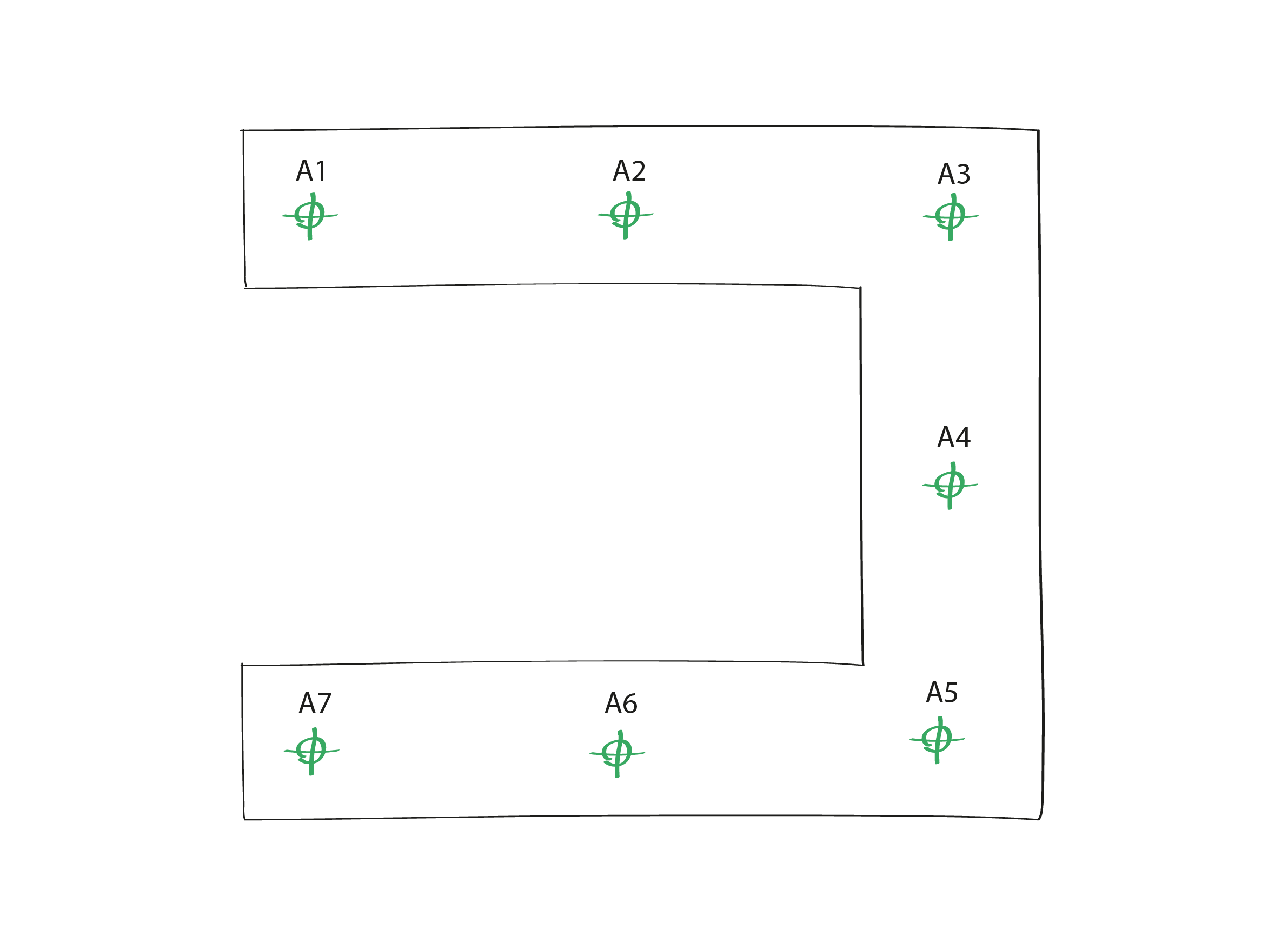
The origin of this coordinate system is not the same as the origin of the dataset - rather, the person measuring the control points chooses one origin for the entire mapping site.
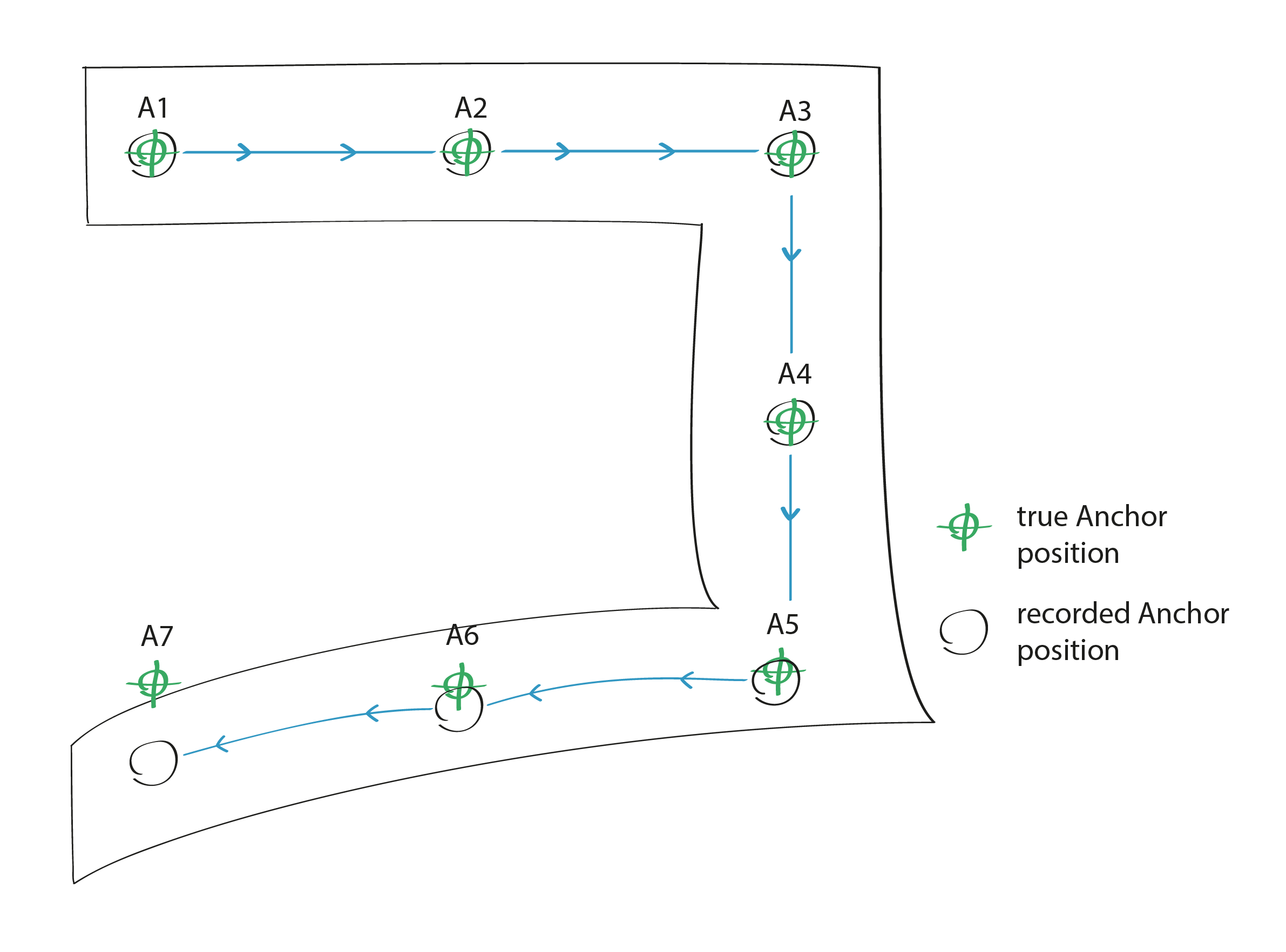
Measured control points added to a dataset during mapping then act as constraints on the trajectory estimate when the coordinate information is passed along to our algorithms during processing.
Compare the trajectory estimate to the real coordinates of the control points.
The post-processing algorithms undistort the datasets according to the constraints given by the control points.
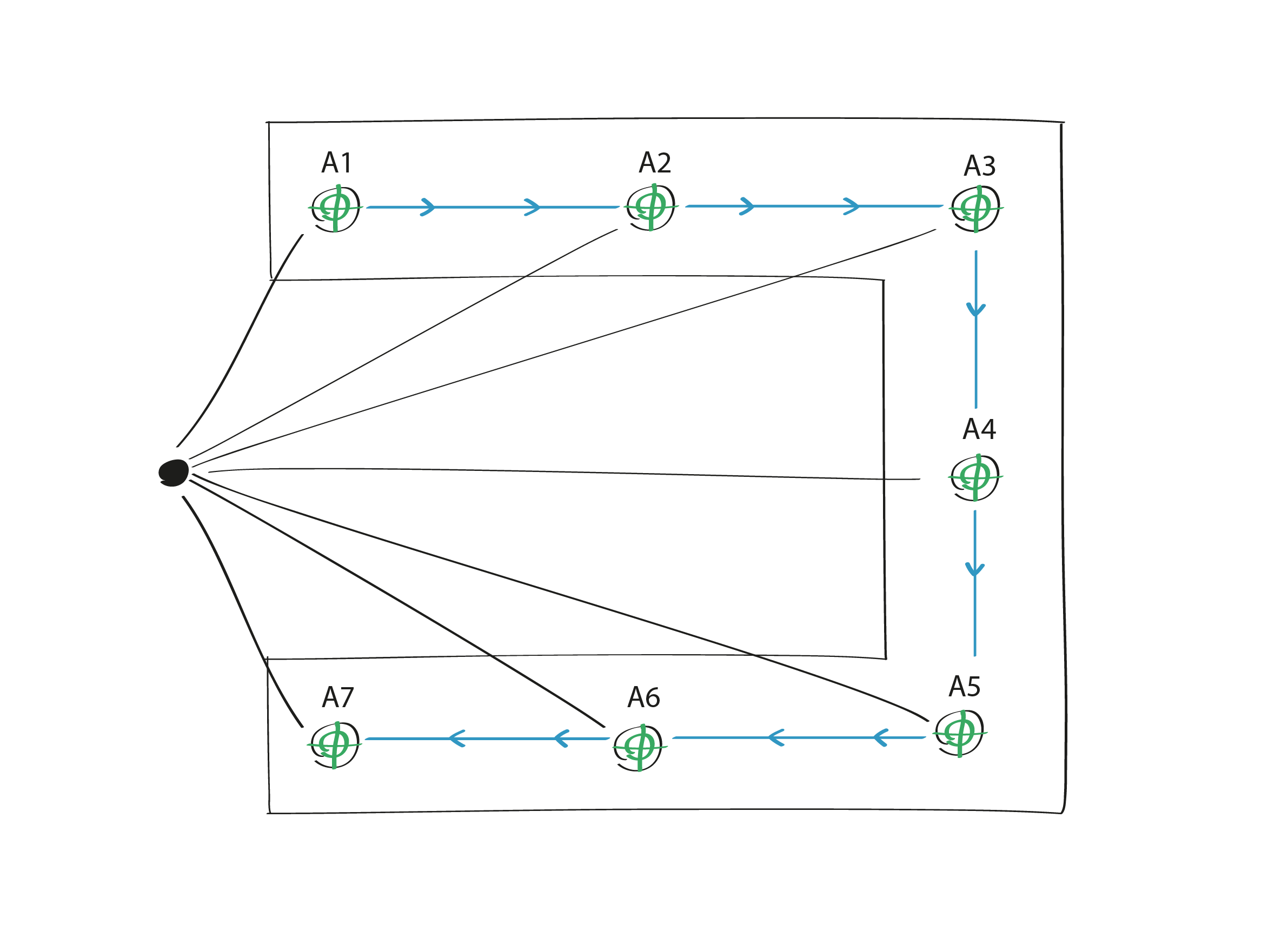
The algorithms also extract alignment information based on the positions of the control points and datasets.